Spatial Representation
Learn how to effectively convey spatial relationships to create immersive and visually compelling 3D experiences
There are many ways to spatially represent a 3D object in the digital sphere, the most common being polygonal representation. The choice of representation method depends not only on purpose but also technical possibilities and sometimes visual aesthetics.
In this lesson, learn about different ways to represent 3D objects in space, where they're used, and their advantages and disadvantages.
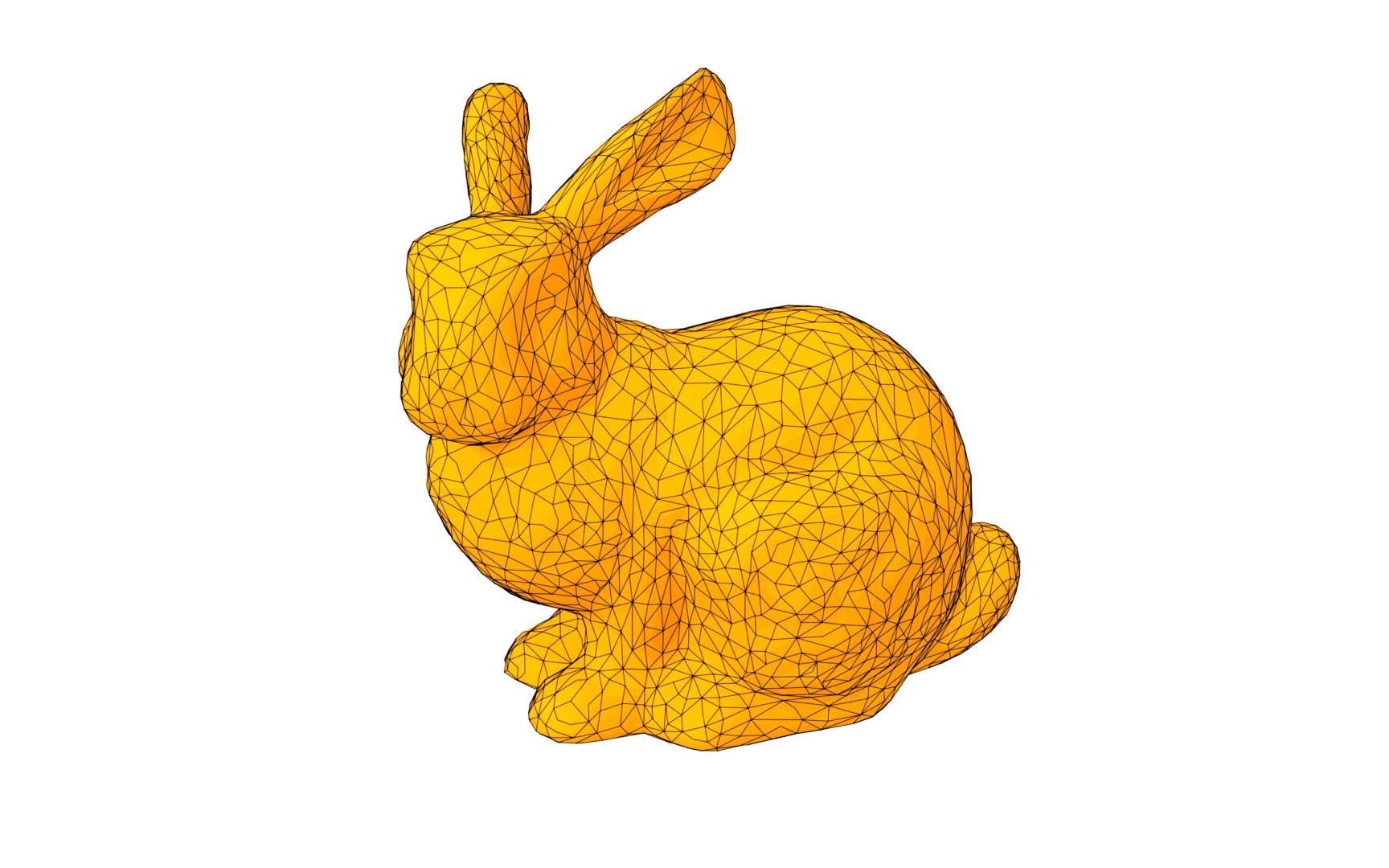
The most common way to visualize 3D objects in computers is by defining objects' surfaces as triangles or polygons. Together, these polygons create what's called a mesh. Polygonal models are the easiest to render and visualize. They can be deformed and animated more naturally — that's why most games and computer graphics applications use some variation of this method. The downside is that mesh isn't well-suited to represent volumetric objects as there is no volume inside.[1]
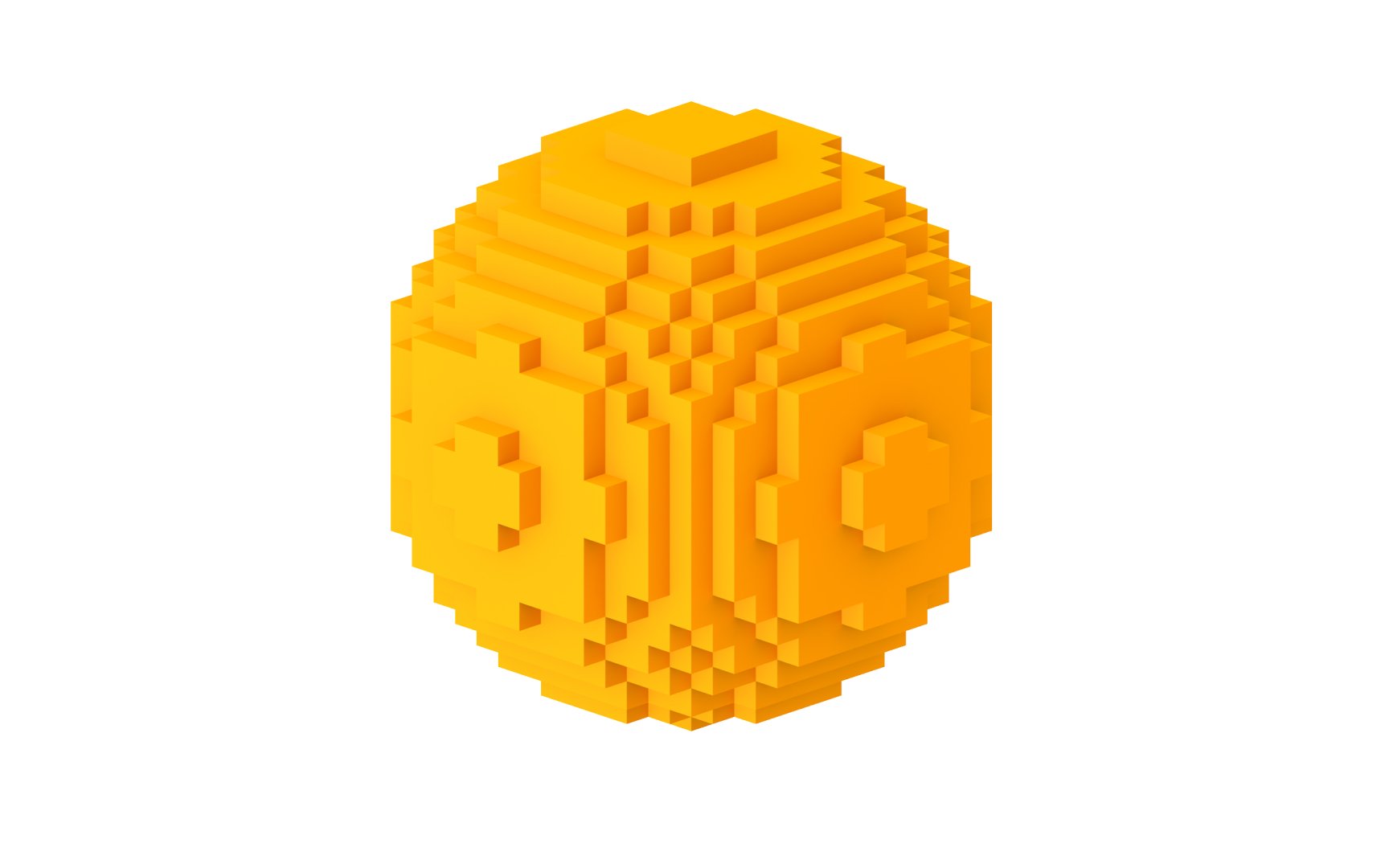
The word "voxel" comes from the phrase "volumetric element," which is basically the 3D analog to 2D pixels. Voxels divide 3D space into uniform 3D cubes — think of Minecraft-style look (although the game doesn't actually use voxel rendering as it's still very resource-intensive). If polygonal models are like meshes, voxels are similar to clay because they have volume, which is great to represent non-homogeneously filled spaces. Voxels are widely used in volumetric imaging in medicine and representations of terrain in games and simulations.[2]
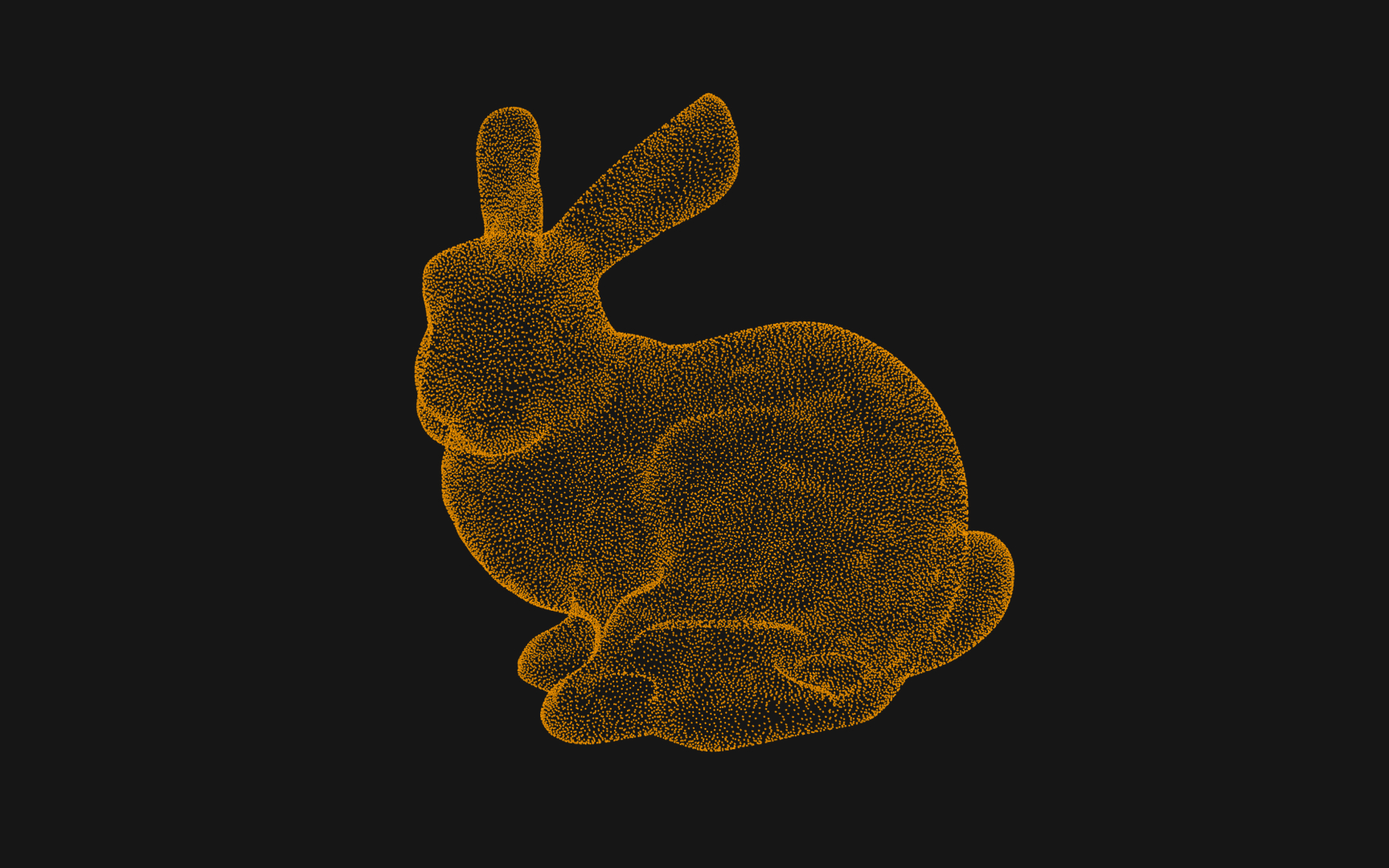
A point cloud is a set of data points in space that represents a 3D shape or object, with each point having its set of XYZ coordinates. Point clouds are generally produced by 3D scanners or Lidar data collection by measuring external surfaces of objects. While we can technically render and inspect them directly, point clouds are often converted to polygon meshes through surface reconstruction.
Point clouds are used to create geographical maps, provide references for real-world CAD models, compare a computer model with reality, and many other types of visualization and animation. In a way, point clouds are the closest way to how our atoms work in real life.
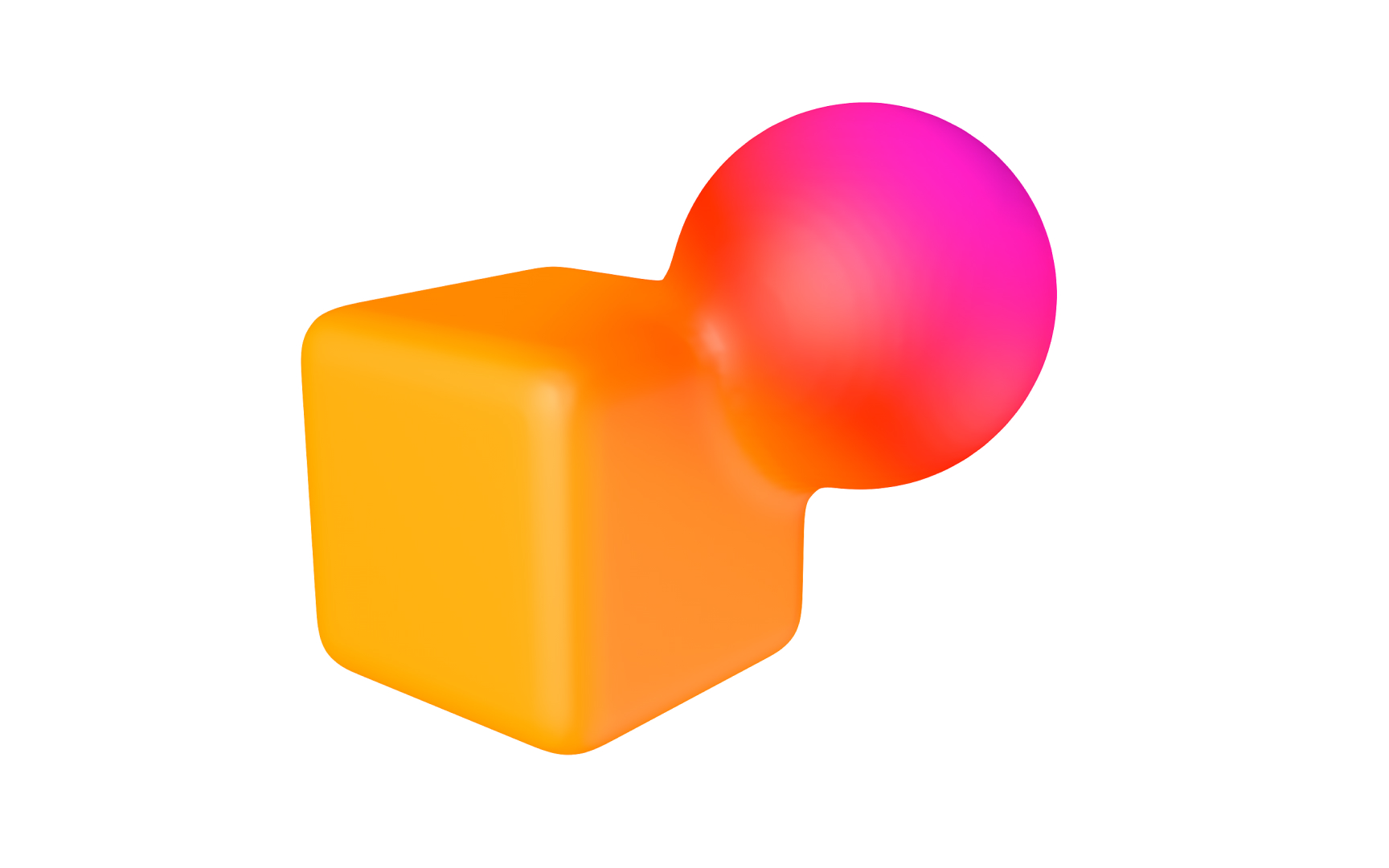
Most modern 3D engines use triangles or polygons to describe shapes. However, some objects, such as spheres or other curved geometries, are impossible to describe with triangles, as the lighting comes out unnatural. The signed distance fields' (SDF) approach is based on the idea that each object can be described with a mathematical function. It takes a 3D point as a parameter and returns a value that indicates how distant that point is to the object's surface. SDF helps overcome 3D engines' limitations and allows creating multiple transformations, including scaling up, bending, twisting, and rotating geometries without ever losing detail.

















Similar lessons

Applications of 3D Design

3D Coordinates System
